
CK3M e CK5M
Controlador programável multi-eixos
O controlo de multi-eixos com o tempo de ciclo de servo mais rápido, de 50 µs/5 eixos, permite um processamento por máquina preciso
- Eixos locais para precisão à nanoescala
- Controlo sincronizado de velocidade ultra-elevada (50 µs/5 eixos)
- Algoritmos personalizados de regulação do servo
- Flexibilidade na utilização de actuadores e codificadores de vários fornecedores
- Flexibilidade na programação em código G, ANSI C ou linguagem de programação original
- EtherCAT para uma configuração flexível
- Design modular e montagem em calha DIN
Especificações e info encomendas
| Produto | Type of module | Max. number of axes via EtherCAT | Max. number of axis interface units | Amplifier interface | Encoder interface | Digital output type | Number of digital inputs | Number of digital outputs | Number of analog inputs | Descrição | |
|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
Motion control | 0 | 4 | 0 | 0 | 0 | CPU CK3M, 1 GB de RAM, 1 GB de Flash, sin EtherCAT. Se pueden conectar hasta dos unidades de interfaz de eje. Se pueden conectar unidades de expansión. |
|
|||
|
|
Motion control | 4 | 4 | 0 | 0 | 0 | CPU CK3M, 1 GB de RAM, 1 GB de Flash, 4 ejes EtherCAT. Se pueden conectar hasta dos unidades de interfaz de eje. Se pueden conectar unidades de expansión. |
|
|||
|
|
Motion control | 8 | 4 | 0 | 0 | 0 | CPU CK3M, 1 GB de RAM, 1 GB de memoria extraíble, 8 ejes EtherCAT, se pueden conectar hasta 2 unidades de interfaz de eje, también se pueden conectar unidades de expansión. |
|
|||
|
|
Analog I/O | 4 | Entradas analogicas CK3W, 4 puntos, +/-10 V, 16 bits (escala completa) |
|
|||||||
|
|
Analog I/O | 8 | Entradas analogicas CK3W, 8 puntos, +/-10 V, 16 bits (escala completa) |
|
|||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | NPN | Unidad de interfaz de 4 ejes CK3W, codificador digital, DirectPWM, NPN |
|
|||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | PNP | Unidad de interfaz de 4 ejes CK3W, encoder digital, DirectPWM, PNP |
|
|||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | NPN | Unidad de interfaz de 4 ejes CK3W, salida DA (PWM filtrado), impulso + dirección o diferencia de fase, codificador de pulso / codificador serie, tipo de salida NPN |
|
|||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | PNP | Unidad de interfaz de CK3W 4 ejes, salida DA (PWM filtrado), impulso + dirección o diferencia de fase, codificador de impulsos / codificador serie, tipo de salida PNP |
|
|||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | NPN | Unidad de interfaz de 4 ejes CK3W, salida DA (DAC real), pulso + dirección o diferencia de fase, codificador de pulso / codificador serie, tipo de salida NPN |
|
|||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | PNP | Unidad de interfaz de CK3W 4 ejes, salida DA (DAC real), impulso + dirección o diferencia de fase, codificador de impulsos / codificador serie, tipo de salida PNP |
|
|||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | NPN | Unidad de interfaz de 4 ejes CK3W, encoder sinusoidal, DirectPWM, NPN |
|
|||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | PNP | Unidad de interfaz de 4 ejes CK3W, encoder sinusoidal, DirectPWM, PNP |
|
|||||
|
|
Encoder input | Not Applicable | Special Serial Protocol | Unidad de entrada de codificador para CK3M, codificador serie de 4 canales, BISS-C, Endat2,2, y R88M-1Lx/-1Mx motor incorporado codificador |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, XY2-100 | Unidad de interfaz láser para CK3M, protocolo XY2-100, salida PWM láser |
|
|||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, TCR, XY2-100 | Unidad de interfaz láser para CK3M, protocolo XY2-100, salida PWM láser y salida TCR |
|
|||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100 | Unidad de interfaz láser para CK3M, protocolo SL2-100, salida PWM láser |
|
|||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100, TCR | Unidad de interfaz láser para CK3M, protocolo SL2-100, salida PWM láser y salida TCR |
|
|||||
|
|
Digital I/O | NPN | 16 | 16 | CK3W DIGITAL IO, ENTRADA/SALIDA:16/16, NPN |
|
|||||
|
|
Digital I/O | PNP | 16 | 16 | E/S digitales CK3W, ENTRADA/SALIDA:16/16, PNP |
|
Como o podemos ajudar?
Se tiver alguma questão ou pretender solicitar um orçamento, contacte-nos ou envie um pedido.
Contactar CK3M e CK5M

Obrigado por ter feito o seu pedido. Entraremos em contacto consigo logo que possível.
Temos experienciado dificuldades técnicas. O seu pedido não foi submetido com sucesso. Por favor aceite as nossas desculpas e tente novamente mais tarde. Detalhes: [details]
DownloadOrçamento para CK3M e CK5M
Através deste formulário pode pedir um orçamento para o produto que escolheu. Por favor complete os campos marcados com *. Os seus dados serão tratados confidencialmente.
Obrigado por ter pedido uma cotação. Enviaremos a respectiva informação logo que possível.
Temos experienciado dificuldades técnicas. O seu pedido não foi submetido com sucesso. Por favor aceite as nossas desculpas e tente novamente mais tarde. Detalhes: [details]
DownloadCaracterísticas

Design modular
O design modular permite combinar livremente o CK3M até duas unidades de interface axial para permitir uma variedade de aplicações.
Power PMAC IDE (Ambiente de desenvolvimento integrado)
- Com base no Microsoft® Visual Studio®
- ANSI C ou linguagem de programação original
- Regulação fácil
- Configuração simples
- Resolução de problemas
- Depurador
Cinemática complexa
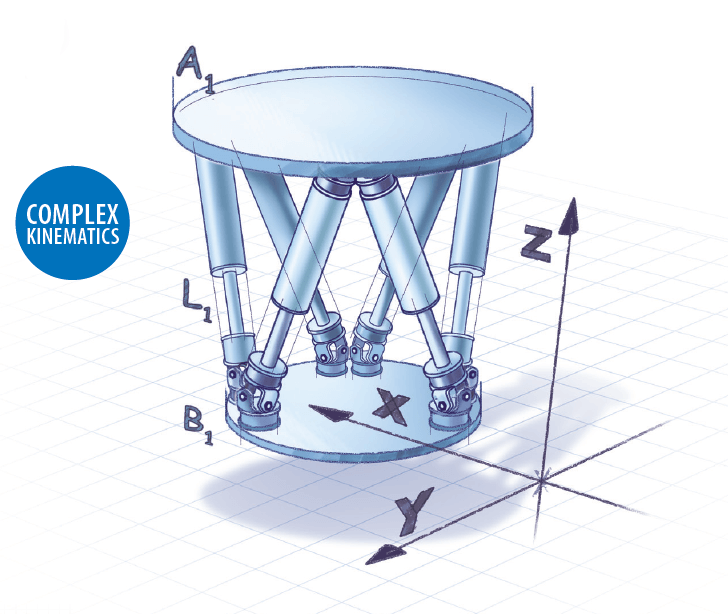
A cinemática complexa pode ser controlada graças ao manuseamento matricial e à conversão de espaços. As aplicações especiais, como o posicionamento do espelho para telescópio Hexapod, podem facilmente ser utilizadas através da funcionalidade de controlo da cinemática.
Tirar partido de funcionalidades para aplicações de precisão
Código G
Interpretador padrão de código G RS-274. Sub-programas graváveis pelo utilizador para uma implementação personalizada dos códigos G, M, T e D. Flexibilidade de adaptação à sintaxe e de funcionamento em conjunto com qualquer software CAD/CAM.
Compensação 2D/3D do sistema de corte
Compensação do diâmetro e da forma da ferramenta para que o ponto de corte corresponda exactamente ao especificado no código G.
Processador rápido + elevada capacidade de memória intermédia de programas
Processador rápido, capaz de processar mais de 10 000 blocos por segundo e programas de peças de 1 GB.
Reconstituição de blocos para reverter o percurso
O percurso pode ser revertido para remover a ferramenta da área de corte.
Antevisão avançada de blocos
As instruções da memória intermédia são analisadas antecipadamente, os movimentos são combinados e optimizados quanta a velocidade e a aceleração para obter um melhor desempenho.
Gestão tangencial das ferramentas
As ferramentas com uma direcção de corte exigem um posicionamento tangencial do percurso.
Software
Power PMAC IDE
Este software informático é utilizado para configurar, criar programas de utilizador e depurar os programas dos controladores programáveis multi-eixos NY51-A e CK3E.
Produtos relacionados
-

CK3E Controlador programável multi eixos
-

Servomotor Sysmac para uso geral
-

Desempenho e viabilidade para controlo de máquinas
Downloads

















_getting_started_guide_en.jpg)
